
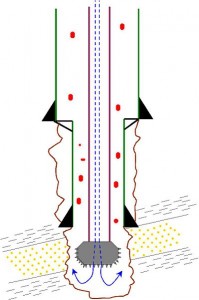
Featured Image: Illustration of boring into the ground. CREDIT: Torero from nl. SOURCE: Wikipedia Commons (GNU Free Documentation License. Public Domain).
From IEEE Spectrum By Evan Ackerman
Bio-inspired robotics has been all over the place. We’ve got robots that walk, run, climb, fly, crawl, and swim. We’ve been kind of missing out on a big domain, though, and that’s animals that dig. You know, like moles. Unlike just about any other sort of robot (or animal), you could have a whole family of moles chillin’ within just a few feet of you (assuming you’re close to the ground, of course) and you’d probably have no idea. And that’s appealing for certain robotic applications:
“One use case is for this robot to drive or be air-dropped to a location close to a target, bury itself to be hidden, perform video surveillance, and send that video back to an operator.” . . . Read Complete Report
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Design of a Bimodal Self-Burying Robot
ICRA 2013
This project was presented at the 2013 IEEE International Conference on Robotics and Automation. The paper included in the conference proceedings can be found here.
Paper Abstract
Subterranean exploration so far has primarily been performed with the assistance and involvement of human beings. As more ground is broken and more layers are explored, the need for a robotic solution to make digging both easier and safer becomes greater. The applications of a self-burying robot extend from mining and military applications to humanitarian applications. This paper elucidates design principles that form the foundation for self burying robots. In this paper, a bimodal robot is described which is capable of travelling above-ground in one mode and capable of burying itself in the other mode. The variables that affect digging are examined, as well as the design decisions made in order to optimize the resources available to the robot. Finally, future work in the area of self-burying robots is discussed. . . . Read Complete Report
~~~~~~~~~~~~~~~~~~~~~~~~~~~
From youtube uploaded by GerbilGod7
Published on Jun 27, 2013
“Design Of A Bimodal Self-Burying Robot,” by Carl Darukhanavala, Andrew Lycas, Arpit Mittal, and Ashwinram Suresh from Carnegie Mellon University Robotics Institute,, was presented at ICRA 2013 in Germany last month.


Leave a Reply